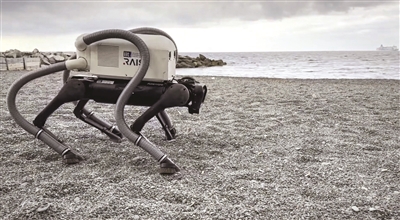

近日,意大利理工学院的研究团队在《现场机器人杂志》上发表了他们的研究——一只名叫“VERO”的机器狗。它背着一个吸尘器背包,四足绑上了带毛刷的吸嘴,专门用于清扫街头巷尾的烟头。
值得一提的是,这只机器狗是根据杭州宇树科技公司开发的机器狗改造而来。
按照研究团队的想法,“VERO”通过摄像头和神经网络训练,可以在行走过程中,锁定目标垃圾,边走路边打扫。
美国科技类网站“NewAtlas”吐槽了“VERO”有四个吸嘴的设计,认为保留两个甚至一个吸嘴就够了。它在海滩上可能会吸走不少沙子。
虽然“VERO”的行动迟缓,离实用仍有很大差距,但不失为有意思的想法。按照研究人员的设想,除了用机器狗来清扫烟头,人们或许可以在它们的四足绑上其他东西,例如某些园艺工具或是用于钉木板的钉枪。
蚂蚁视觉系统
助力微型机器人自主导航
蚂蚁等一些昆虫有很强的“识途”能力,即使远行也能顺利找到“回家”的路。
荷兰代尔夫特理工大学的研究人员日前在美国《科学·机器人学》杂志上发表论文说,他们从蚂蚁等昆虫的视觉导航能力获得启发,创建出一种适用于微型、轻型机器人的仿昆虫自主导航策略。
重量从几十克到几百克不等的微型机器人有巨大的应用潜力。小巧的体形使它们能在狭窄区域灵活移动,并可以实现大规模部署,例如可用于在温室中检测早期病虫害等。
然而,对于微型机器人来说,自主导航是个难题。自动驾驶汽车等较大型人工智能设备所搭载的传感器、处理器等相对较重且耗电量大,微型机器人无法携带;全球定位系统(GPS)在室内难以使用,处于有遮挡的城市环境中可能导致定位不准。
此前研究已知,蚂蚁等昆虫能把对自身移动的“里程测量”与基于“快照”的视觉引导行为结合起来为自己导航。在行进中,蚂蚁会利用其视觉系统不时为周边环境拍“快照”,作为重新找到这些位置的依据。当到达“快照”位置附近,它们会将当前视觉感知与“快照”比较,并移动到两者之间差异最小化的地方,这使得它们能自己导航返回此前拍“快照”的位置。
基于这一原理,研究人员研发出采用“快照”导航模式的微型机器人——重量仅56克、名为“CrazyFlie”的小型无人机。它配有全向摄像头,能结合“里程测量”找到自己留下“快照”的各个位置,可实现长达100米距离的自主返航。
研究人员表示,受昆虫启发的自主导航策略有助于推动微型机器人在真实场景的广泛应用,比如可用于仓库库存跟踪监控或温室作物监测等,小型无人机则能自主飞出去收集数据并返回基站。